
Ya es ampliamente conocido el esquema que presenta la evolución de los vehículos autónomos desde el nivel 0 (vehículo sin ningún tipo de ayuda al conductor) hasta el nivel 5 (vehículo totalmente autónomo). Entre los distintos fabricantes del sector de automoción hay mucha diversidad en la forma de afrontar esta evolución. Algunos lo tienen como objetivo principal de sus desarrollos presentes y, en el caso de Tesla, las evoluciones se van incorporando no solo en los nuevos vehículos sino también en cada vehículo que ya está circulando, a través de una actualización remota de software. Aunque el uso extensivo de vehículos autónomos nivel 5 no se produzca hasta finales de la década, es posible que podamos disponer ya de vehículos que pueden circular de manera autónoma (nivel 4 o 5) en ciertos entornos y bajo ciertas condiciones.
Mientras los niveles de automatización del vehículo cubran simplemente funciones de ayuda al conductor humano, será el propio humano quien tome las decisiones en el vehículo. El proceso de validación del conjunto vehículo-humano es muy simple y lleva siendo el mismo desde hace más de 100 años. Por una parte se valida cada modelo de vehículo, para lo cual se le hacen pruebas en entornos de laboratorio frente a una serie de normas internacionales; por otra parte se valida a cada humano a través de una formación teórico-práctica y unas pruebas físicas con la que se establece un nivel mínimo para poder conducir un vehículo. Como las decisiones las toma el humano, la experiencia del humano juega un papel muy relevante para lograr una conducción segura. Esa experiencia no solo se basa en sus horas de conducción ya que en muchas ocasiones es más relevante lo que los humanos llamamos el «sentido común» que, en realidad es un conocimiento adquirido durante toda la existencia del humano.
El sentido común es el que nos lleva a interpretar si una señal torcida o parcialmente tapada está dirigida a nosotros, es el que nos permite establecer dónde están los límites de nuestro carril en una carretera en la que no se vean correctamente las marcas viales del suelo, o es el que nos permite identificar una situación de alto riesgo por el avance del agua en un desbordamiento de un río. Algunos de estos ejemplos son muy habituales y otros menos pero, probablemente, cualquier conductor humano es capaz de tomar una decisión ante una de estas situaciones, tanto si es un conductor con muchas horas al volante como si es novel.
En la automatización de los vehículos el problema es que lo que no se entrena no se puede resolver. Recientemente, en un congreso internacional de vehículos autónomos se ponía el ejemplo de lo sucedido en una carretera costera afectada por un tsunami. En el vídeo grabado a través de una cámara fija se ven varios coches que, al ver llegar de frente agua y escombros, dan la vuelta rápidamente y huyen del lugar por donde habían llegado. El vídeo era un ejemplo de una situación poco probable y difícil de entrenar. Este ejemplo nos permite visualizar lo difícil que será llegar a una automatización nivel 5 en cualquier circunstancia pero también nos permite entender que conseguir la digitalización de la carretera es tan importante como la automatización del vehículo en sí.
En el congreso ITS Iberoamericano celebrado en Junio de 2020, Francisco Sánchez Pons (CTAG) explicó la necesidad de adaptación de las infraestructuras para el despliegue de la nueva generación de vehículos automatizados y conectados. Los puntos básicos de esa adaptación son el uso de geometrías seguras, el buen estado del firme, el correcto estado de las señalizaciones verticales y horizontales, el diseño de los carriles de incorporación y salida, la gestión de zonas de parada de emergencia, el balizamiento e iluminación adaptativos, la gestión de carriles adaptativos,
los mapas de alta definición, la gestión inteligente de la movilidad y, cubriendo todos los anteriores, el uso de tecnologías de comunicación. Incluso el más sencillo y obvio de todos ellos requiere de una supervisión continua por parte de la entidad gestora de la carretera.
Podría parecer, por ejemplo, que el uso de geometrías seguras es una condición ya cumplida en el momento de la construcción de la infraestructura. La realidad es que cada obra que se realiza en la vía altera esa geometría, al menos durante su ejecución. Podría parecer también que la señalización horizontal tiene una degradación lenta y paulatina que, por tanto, solo obliga a vigilarla cada ciertos meses o años. La realidad es que ciertas condiciones climatológicas (agua o nieve) o la simple presencia de hojarasca pueden reducir la visibilidad de las marcas viales en breves lapsos de tiempo.
El proyecto INFRAMIX está trabajando en la categorización de las infraestructuras para comprobar su nivel de adecuación a los vehículos autónomos. Las infraestructuras se dividen en 5 niveles que van del nivel A que corresponde a una infraestructura totalmente digitalizada y utilizable por un vehículo autónomo al nivel E que corresponde a la carretera convencional sin información digital. Como se ve en la tabla adjunta, para ascender del nivel E al A es necesario dar cuatro pasos.
Click para ampliar la imagen
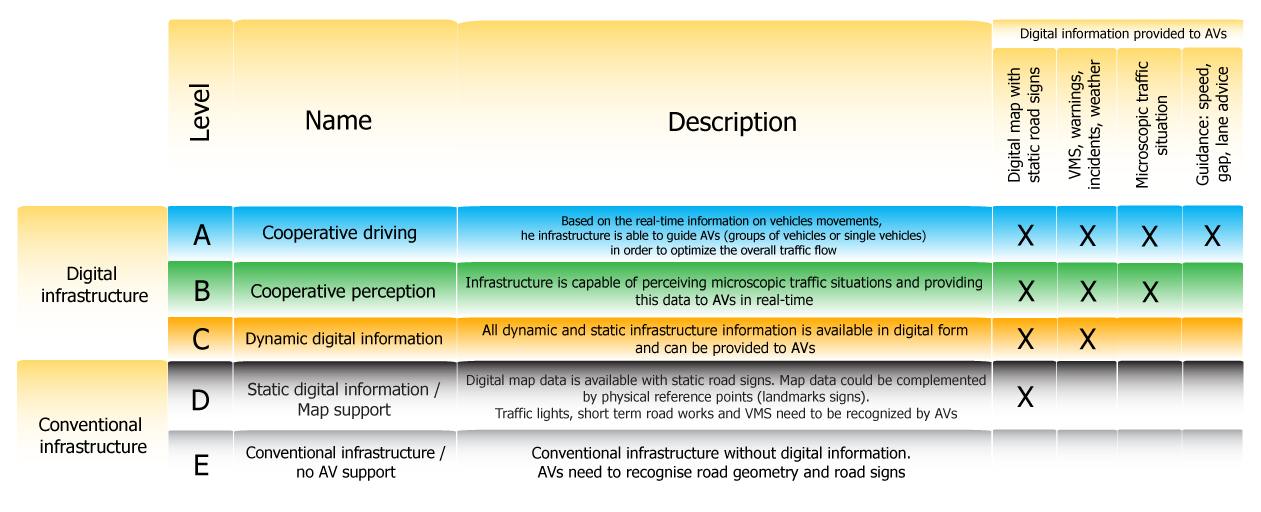
Figura 1. – Niveles de digitalización de la carretera
El primer paso, nivel D, es digitalizar el mapa de las señales estáticas. Este paso incluye señalización vertical y horizontal, balizamientos y otros elementos fijos de la infraestructura. Incluye, por supuesto, su inspección y mantenimiento continuo.
El segundo paso, nivel C, es la suma del nivel D y la digitalización de la información dinámica. Este paso incluye la mensajería variable, los avisos de incidentes, los avisos meteorológicos, los avisos desde vehículos en la propia vía…
El nivel B, llamado también percepción cooperativa, suma las capacidades de los niveles anteriores e incluye la capacidad de percibir la situación microscópica del tráfico.
El nivel A, llamado conducción cooperativa, es la capacidad por parte de la infraestructura de guiar al vehículo, hecho que solo se podrá lograr cubriendo todos los niveles anteriores.
Muchos gestores de carreteras han lanzado ya grandes proyectos de conducción cooperativa. En los medios de comunicación se anuncian «carreteras inteligentes» o «smart roads» porque se ponen en marcha proyectos que son capaces de establecer comunicaciones entre la infraestructura y vehículos preparados para ello (muy pocos aún). Por desgracia, estos proyectos lograrán muy poco impacto ya que pretenden abordar el nivel A sin pasar por los niveles anteriores.
En la siguiente figura podemos observar el resultado de una inspección de señalización vertical, balizamientos y paneles de mensajería ejecutado gracias al sistema automatizado de inspección de ASIMOB, que utiliza Visión Artificial para el reconocimiento de las señales de tráfico, señales de obra y balizas. La inspección se realizó en menos de dos horas, en el trayecto Llanes (Asturias) – Bilbao (Bizkaia), con un solo vehículo no destinado a labores de mantenimiento, circulando a velocidad normal. Cada punto rojo en el recorrido implica la detección de un elemento incorrecto.
Click para ampliar la imagen
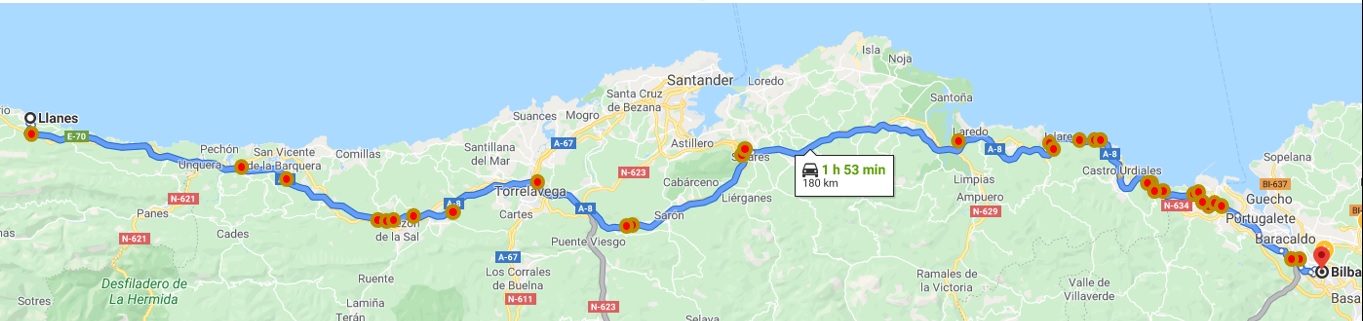
Figura 2. – Ubicaciones de puntos con señalización incorrecta en trayecto Llanes-Bilbao
Todos los fallos detectados corresponden a comprobaciones en los niveles E y D anteriormente explicados. Son 32 fallos que incluyen la ausencia de una señal, señales tapadas por arbustos o vandalizadas, conos de obra abandonados, señales de obra abandonadas, balizamientos rotos, señales de obras con el orden incorrecto, señales de obras utilizadas como permanentes, mangas de viento rotas y paneles de mensajería ilegibles.
Es importante recalcar que el trayecto evaluado corresponde a autopistas y autovías que, por tanto, tienen contratado un mayor mantenimiento que otro tipo de carreteras. También es importante destacar que en este trayecto se suceden zonas en las que las empresas de mantenimiento contratadas son diferentes. Esto resulta llamativo por dos causas: por un lado, porque en todas las zonas se observaron errores; por otro lado, porque en algunas zonas se observan errores recurrentes. ¿Por qué resulta tan difícil mantener estas carreteras en buen estado?
Aún no hay prácticamente ningún operador, de los que gestionan centenares o miles de kilómetros de carretera, que tenga las señales digitalizadas. Los inventarios son antiguos y no se mantienen. El control de las señales depende de la memoria y el conocimiento de las personas que están a pie de carretera. También depende de su buena vista y su capacidad de conducir a la vez que supervisan. Depende, incluso, de las costumbres que se hayan establecido en la empresa en la que trabaja ¿Sería posible para una persona detectar los 32 fallos que se detectaron en el trayecto Llanes-Bilbao en menos de dos horas? Prácticamente imposible.
Las infraestructuras digitales son un paso imprescindible para lograr unas carreteras más seguras. La sencillez de la aplicación de sistemas de Visión Artificial o IoT a bordo de vehículos facilita enormemente la digitalización, no solo en vías principales sino también en vías secundarias. La mejora de mantenimiento de las vías principales sería relevante pero, más importante, el «lujo» de mantener las vías secundarias al mismo nivel que las principales está al alcance de la mano. Como decía recientemente el Dr. Bill Sowell de International Roads Federation (IRF), nunca olvidemos que «SAFER ROADS» (carreteras más seguras) son siempre «SMARTER ROADS» (carreteras más inteligentes).
El objetivo de lograr un vehículo conectado y, más allá, un vehículo autónomo de nivel 5 requiere pasos previos por parte de la infraestructura. Esos pasos, no solo ayudan a recibir mejor las tecnologías del futuro; también permiten hacer más seguras las carreteras para los conductores humanos de hoy en día. Cuando vayamos a anunciar o veamos un anuncio de «carreteras inteligentes» pensemos primero si tenemos los cimientos para ello.
IBON ARECHALDE




{kind=link}